
Productivity Considerations for Shovels and Excavators
Better technology and more power make loading tools more productive,
but well-trained operators are the most important aspect
By Steve Fiscor, Editor-in-Chief
A mine measures cycle times to determine equipment performance and operator efficiency. Those statistics also serve as a measure of efficiency of the entire operation. Unusually high readings in certain segments can highlight problems. By measuring cycle times, benchmarks can be established, allowing a quick check that all is well.
In the past, original equipment manufacturers (OEM) focused on the piece of equipment that they marketed. That has changed, especially with hydraulic excavators, now that most of today’s OEMs offer a loading tool and a haul truck. Only two companies manufacture electric shovels and all of the haul truck OEMs maintain a close dialogue with them. Talk to a shovel or excavator specialist, however, and they will probably say that more often than not the loading tool is waiting for the truck.
The reality of the situation is that more mines are using enterprise platforms that employ dispatching systems to optimize truck fleets. The shovels are competing with a computer that is staging the trucks and also monitoring its performance. From an engineering perspective, that brings shovel productivity back into play.
During Haulage & Loading 2007, E&MJ organized an OEM roundtable discussion. The theme was Reducing Cycle Times. Seven OEM panelists participated and each was asked to identify areas where they could improve cycle times for the mines. Although most of the discussion centered on haul trucks, a couple of the panelists shared their thoughts on shovel productivity as it relates to cycle times. The topics ranged from truck-shovel pass matching to payload management. At the end of the session, it was clear that all the minutes saved per cycle meant nothing if the mine did not have a properly trained operator.
Hydraulic Excavators Rise to the Challenge
Over the course of 30 years, Peter
Ahrenkiel, manager of technical applications,
Terex Mining, has seen a lot of
changes in hydraulic shovels. More recently
he attributes productivity improvements
on the machines to electronically optimized
pump management systems; a
closed-loop swing that provides the most
power when needed; independent cooling
systems that allow the machine to run full
speed; and high-pressure hydraulics. “Over
the years, not only has the size of the
hydraulic excavator grown, but so has the
machine’s reliability,” said Ahrenkiel.
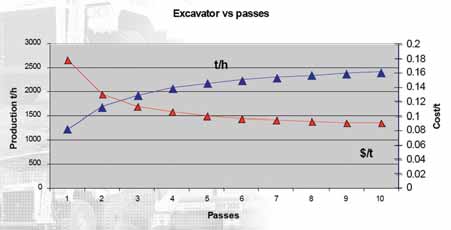
When it comes to pass matching, Ahrenkiel believes the optimum lies somewhere between three and six passes. “Pass matching is very important,” Ahrenkiel said. “A small loading tool constrains productivity. There are physical limits to consider, such as reach, view and rear swing. There are also economic limits. Idling trucks lower production.”
Loading the truck in the fewest amount of passes is not necessarily the best approach. Citing an open-pit coal mine, Ahrenkiel explained how an RH 200 with a 50-ton bucket was loading 200-ton trucks in five passes and the mine operator was pleased with the performance. “The mine was happy with five passes and an 80% fill factor or four passes with a 90% fill factor and one pass with a 40% fill factor,” Ahrenkiel said. “Why would they not rather have four passes at 100%? The added fill factor requires an extra two or three seconds per cycle and a faster loading cycle leads to a faster truck cycle. Ultimately a faster truck cycle is what the mine is trying to achieve.”
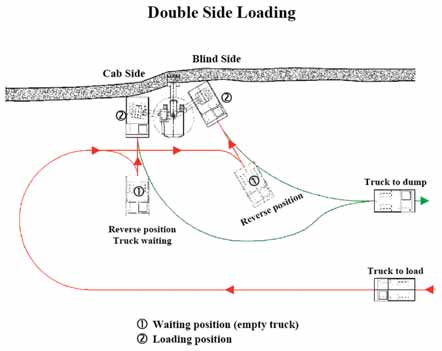
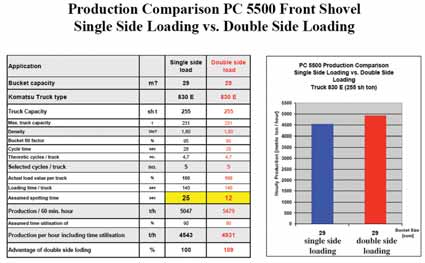
For front-shovel applications, Sammut said the cycle time for bucket door opening to bucket door opening in reasonable digging conditions would be 25 to 30 seconds. “Backhoe configurations are slightly different and the cycle times can be quite fast compared to front-shovel configurations,” Sammut said. “If the backhoe is set up correctly with the truck on the lower level with the bucket raking up the face and a low swing angle [20º to 30º], the cycles time could be as little as 20 to 23 seconds. With the truck on the upper level, it’s not nearly as efficient. Clearly the shovel operator has to load the bucket and swing and lift to load the truck.” In a comparison between loading configurations, double-side loading, which is a little more complex than single-side loading, proved to be a little more productive.
Sammut is somewhat critical of current payload management systems on the haul trucks. “It presents problems for a mine where the material density varies,” Sammut said. “Sure, you want the operator to dump a full bucket every time. These systems are nice from an operational point of view—especially great from a management point of view—but in terms of controlling what goes into the truck, it’s counter productive. The drivers get confused. The shovel operators take more time to load the trucks perfectly. You have to match the truck to the shovel in the dig you’re in.
“Cycle times are critical to mine efficiency and theory can be far from reality,” Sammut said. “Don’t fixate on one area of the whole cycle. Don’t be afraid to make changes. Actually measure, do not rely only on estimates. Don’t crucify the excavator salesman.”
Getting More from the Electric Shovel
Electric shovels spend most of their time
digging. According to statistics provided
by Walter Koellner, business managermining,
Siemens Industrial Solutions and
Service, the shovel digs 79% of the time.
The remainder of the time is spent waiting
or idling (9%). Some time is dedicated to
clean up work (5%). The shovel is offline
3.5% of the time and it propels to a new
digging position 3.1% of the time.
Siemens builds drive systems for electric
shovels.
The cycle time for an electric shovel differs slightly from a hydraulic excavator. For an electric shovel with a 70º swing radius, the cycle time averages 33.8 seconds, according to Koellner. The electric shovel requires 11 seconds to fill the bucket. The swing time accounts for 11.5 seconds. The dump time is 3 seconds. And, it takes 8.3 seconds to swing back and lower the dipper into position. “Whether it’s 33.8 seconds or whatever, we have these big chunks of time that we could reduce,” said Koellner. “The mines are looking for more raw power to accomplish this.”
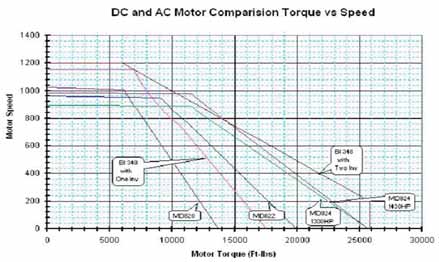
Typically on the shovel, Koellner explained that three factors contribute to improved cycle time: higher pull torque, higher peak power and higher speeds to swing and lower the dipper. “The shovel operator wants higher power and the ability to accelerate through the bank,” Koellner said. “We have had some improvement with AC drives where they saved as much as 2 seconds per cycle, which amounts to about 20 minutes a day.”
Oftentimes it’s difficult to get the digging process started. The operator has to lower the bucket and close the door with a pendulum motion. Floating a few ideas, Koellner proposed a position control system that would bring the dipper into the right position using lasers or radar/ultrasound system to detect the face and the toe. “Then, the operator would not have to do all of these tricks to get the digging cycle going,” Koellner said. “We could probably save about 1 second per cycle or 10 minutes per day with such a system.”
During the digging process, the shovel operator retracts before hoist motors stall and then crowds as hard as possible against bank to fill the dipper. If the shovel’s hoist and crowd functions were better coordinated, the cycle time could be reduced during the loading phase. The object would be to pass through the bank and fill the bucket quickly, but not so fast that the hoist motors stall. “The mines need a system that combines these two motions and that can be done,” said Koellner. “We [Siemens-Bucyrus] are looking at algorithms. There are improvements that can be made.” Koellner suggested that algorithms could control hoist and crowd together during digging. When the hoist speed falls off, it retracts until hoist speed picks up again.
Payload management, or filling the dipper to correct weight, also influences the digging phase. If the shovel operator knew the weight of the material in the bucket while digging, then he could stop and begin to load. “Nobody can do that right now,” said Koellner. “It’s kind of difficult to calculate because of all of the forces to consider. There are ways to do it. If we could do that we could say to the operator green light, now swing over and load the truck.” Koellner estimates that could save about 2 seconds per cycle or 20 minutes per day.
Shovels have never been known for their speed, but the propel function influences cycle times in other ways. The shovel needs to be positioned so that it gets the highest number of full dippers before moving again. “When we measured the bucket load after the propel and compared it with before the propel, we found that bucket movements were not as good,” Koellner said. “Maybe the operator did not propel to the optimum position.” Future shovels may be able to scan the bank profile to determine correct distance, starting position, and digging trajectory.
Putting the truck in the right position also saves time for the shovel operator. By being better able to tell the truck driver where to park, Koellner estimates that an additional 20 minutes per day could be saved. Likewise the swing time to the truck could be optimized. An automated swing algorithm could accelerate and decelerate with position control, and better control the dipper opening This could save an additional 20 minutes per day. Koellner also estimated that another 20 minutes could be saved by better operator training and a consistent clean up process around the loading area and face.
By maximizing speed/torque for high acceleration, high peak power and high top speed; using intelligent automated digging, spotting, swinging and loading support; and advance operator training, Koellner believes that a mine could save as much as 125 minutes per shovel per 20- hour day. “We are working on all of these items now and plan to introduce the results at MINExpo 2008,” he said.